Underwater inspection on twelve wheels.
Inspecting flooded pipes of power plants requires skilled, high-precision handling and the robotic vehicles that are used to do this have to be optimised accordingly. The new seawater manipulator is capable of maneuvering underwater in pipes, where it can be used to perform inspections. DC motors and gearheads by maxon are responsible for the dynamic drive of the robot.
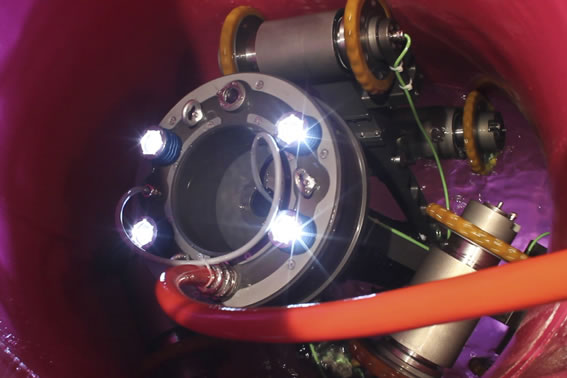
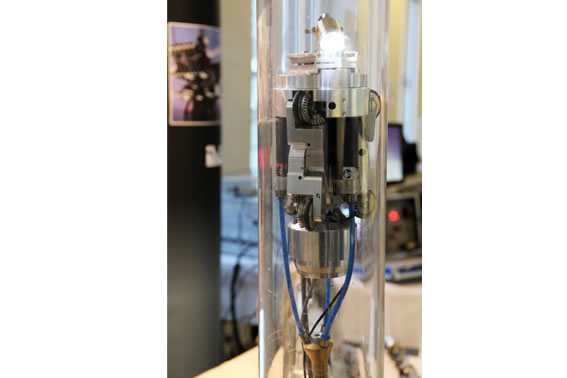
In robotics, manipulators are those devices that enable physical interaction with their surroundings. In the case of the seawater manipulator this equipment largely consists of high-performance cameras used for pipe inspection. Ibass, from Augsburg in Germany, develops, manufactures and distributes manipulators for various in-pipe applications: inspection, grinding, welding, retrieval or suction. The manipulators consist of a driving unit, the required work module and a camera. They are operated electrically and pneumatically and therefore drag along lines behind them. The target groups for these small robotic vehicles are primarily operators of power plants and refineries, as well as pipe manufacturers and assembly fitters of pipeline systems: “For example, we make perfectly executed welding seams possible during assembly,” explains Michael Strasser, managing director of Ibass.
The area of application of the seawater manipulator includes visual inspection of power plant coolant pipes that cannot be emptied (a task that requires a manipulator suitable for seawater use). This type of manipulator is also used for applying inner coatings to pipelines, as sealed wheel units are mandatory. The seawater manipulator developed by Ibass can maneuver and inspect pipes with inner diameters of 550 to 780 mm. This pipe diameter range is a result of the axial stroke of the pneumatic cylinder, or the deflection of the scissor-type mechanism.
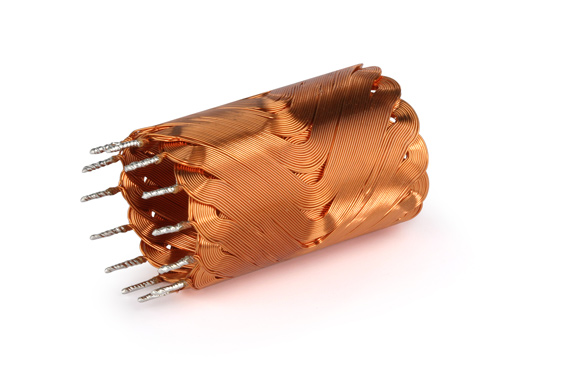
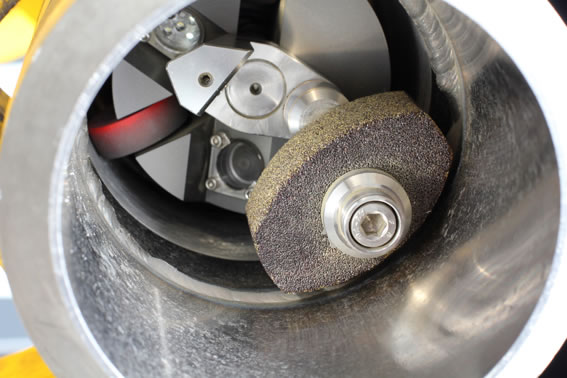
The scissor drive works with a total of twelve wheels, two each per scissor side and drive motor, which give the vehicle a firm hold even in coated pipes, thanks to their variable contact force. For the drive, a total of six powerful RE 40 DC motors are used in combination with planetary gearheads – one per wheel pair. The DC motors are characterised in particular by their efficiency of more than 90%, resulting in low energy consumption and a very high torque, which is an important prerequisite. The motors are equipped with ironless windings and neodymium magnets that enable maximum performance packed into a minimum size. The robustness and long service life of the maxon motors were decisive criteria for Ibass.
High motor robustness is vital, as the manipulator has to withstand the on-site conditions – it can handle a pressure of up to 2 bar which means it can dive up to 20 m deep. It provides a tractive force of approx. 250 kg (2.5 kN) and the robot can drive a distance of up to 200 m into the pipe. The manipulators are equipped with lights at the front and back. At the front, there is a high-quality camera with pan-tilt head and a 10x zoom; at the rear a single-head camera is mounted. From grinding and testing to inspection and retrieval the seawater manipulator can be fitted with all Ibass work modules and can overcome up to five pipe bends with ease (see Video). The work modules are also equipped with DC motors from maxon’s RE programme for the rotation and axial adjustment of the dye penetration unit. During the dye penetration test the inner pipe surface is checked for cracks by means of a special method. The in-pipe manipulators are important tools for today's industries and ensure safety and reliability, in areas such as nuclear power plants and offshore wind parks.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}